Medical Devices and Materials Engineering SectionInterface Systems
Development of the robot for needle insertion during CT-guided Interventional Radiology
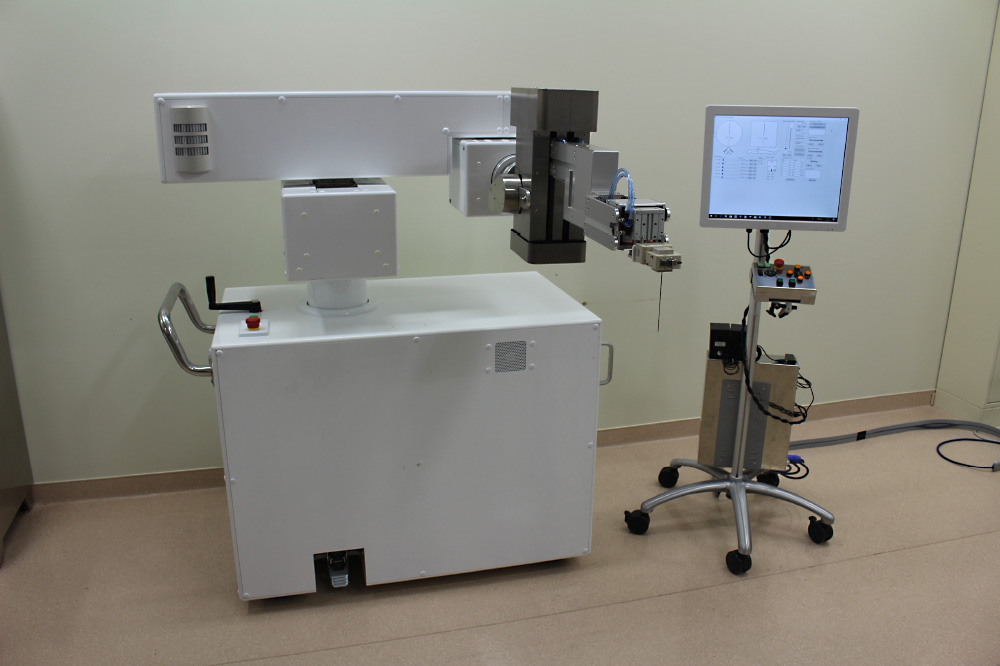
We have been developing a remote-controlled robotic system (ZerobotⓇ) for needle insertion during computed tomography (CT)-guided interventional procedures, such as ablation, biopsy, and drainage. Experiments have indicated that robotic insertion is equivalent in accuracy to manual insertion, without physician radiation exposure.
Introduction of Researchers
Medical Devices and Materials Engineering Section Interface Systems
Professor GOFUKU Akio
Associate Professor KAMEGAWA Tetsushi